-


-


-


-

 Delen
Delen
Betrouwbare toestandschatting voor autonome robotnavigatie – onderzoek bij SMART Research Group
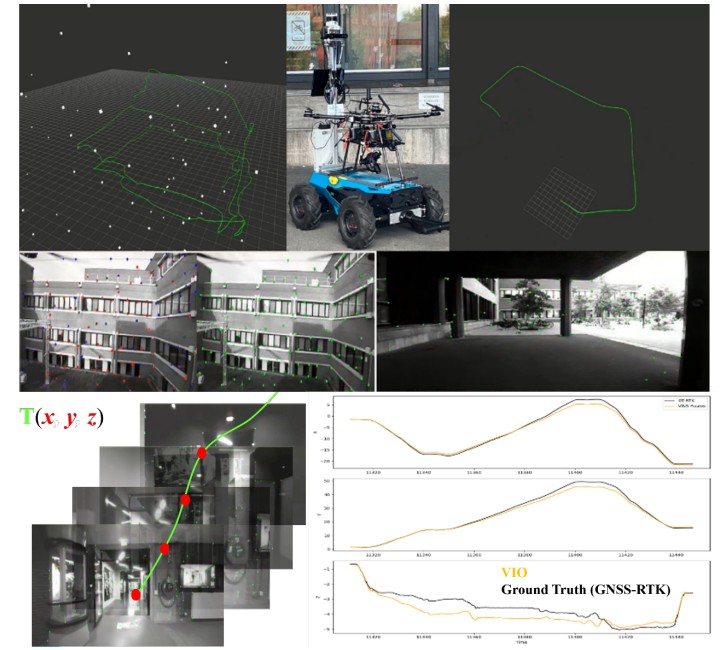
De inzet van autonome lucht- en mobiele robots in industriële omgeving en neemt sterk toe. Een cruciale technologie die dit mogelijk maakt, is betrouwbare toestandschatting: het nauwkeurig bepalen van de positie en beweging van robots, ook in omgevingen waar geen GPS-signalen beschikbaar zijn.
Binnen de Mechatronics and Robotics Research Group (SMART) ontwikkelen we perceptie gebaseerde positioneringstechnieken, waaronder Visual Inertial Odometry(VIO). Deze systemen combineren visuele en inertiële sensordata om nauwkeurige positiebepaling mogelijk te maken, zowel binnen als buiten, en zonder afhankelijkheid van GNSS.
Onze onderzoeksactiviteiten richten zich op het verbeteren van:
– De integratie van toestandschatting binnen de regelkring;
– Sensorfusie voor meer nauwkeurigheid en robuustheid;
– Verwerkingstijd en schaalbaarheid voor industriële toepassingen.
Deze technologieën worden getest met mobiele en luchtrobots en leveren al veelbelovende resultaten op, onder andere in vergelijking met GNSS-RTK referentiesystemen. Een korte demonstratie is hier te bekijken.
Om deze ontwikkeling verder te brengen, initieert SMART een consortium rond perceptie gebaseerde toestandschatting. We zoeken bedrijven die willen meedenken over toepassingsgebieden en mee vorm willen geven aan de visie voor industriële toepassingen.
👉🏻 Meer informatie of interesse? Neem contact op met Mohammad Amro AL-Dibaja, Eng. PhD., Associate professor SMART via 06-41832724.
