-


-


-


-

 Delen
Delen
Multi-camera lokalisatiesysteem voor een magazijndrone
Binnen de SMART Mechatronics and Robotics Research Group van Saxion Hogeschool werken we regelmatig aan robotlokalisatie in omgevingen waar geen GPS-signaal beschikbaar is. Een voorbeeld hiervan zijn magazijnen, waar we samen met Arox Logistics en Nestfly de specifieke uitdagingen van robotlokalisatiesystemen onderzoeken binnen het door SIA gefinancierde RAAK Kiem project ‘Against-GPS’. Het is essentieel om de kosten per individuele robot laag te houden, terwijl tegelijkertijd voldoende nauwkeurigheid wordt behouden zodat de robot zelfstandig elk gewenst waypoint in het magazijn kan bereiken. Eerder zijn systemen met Ultra-Wideband (UWB)-ankers getest, maar deze bleken relatief kostbaar en onvoldoende geschikt om grote magazijnomgevingen effectief af te dekken.
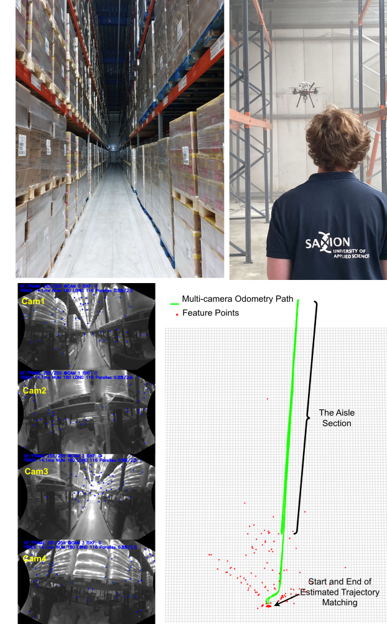
Geïnspireerd door succesvolle commerciële vliegende robots zoals DJI en Skydio, en voortbouwend op recentere visie gebaseerde lokalisatiesystemen zoals OmniNxt, hebben we een configuratie met meerdere groothoekcamera’s geïdentificeerd als een potentieel betrouwbare en kostenefficiënte oplossing. De kosten van een opstelling met vier camera’s bedragen ongeveer 300 dollar. Een dergelijk ontwerp biedt verschillende voordelen, waaronder de mogelijkheid om omgevingskenmerken rondom de robot continu te volgen, een grotere robuustheid tegen dynamische objecten in de omgeving en een hogere weerstand tegen zichtbelemmeringen aan specifieke zijden van de robot. Daarnaast maken overlappende beeldvelden tussen aangrenzende camera’s stereovisie rondom de robot mogelijk. Deze aanpak brengt echter ook uitdagingen met zich mee, zoals de grotere hoeveelheid gegevens die in realtime verwerkt moet worden en het beperkte aanbod van open-source hulpmiddelen voor systeemkalibratie en lokalisatie-algoritmen.
Onze meest recente experimenten tonen aan dat visueel-inertiële odometrie met meerdere camera’s daadwerkelijk nauwkeurig functioneert in de lange, smalle gangpaden van het magazijn van Arox. Tijdens deze tests realiseerden we een odometrische afwijking van minder dan drie meter over een afgelegde afstand van bijna vijfhonderd meter, wat neerkomt op een drift van ongeveer 0,6%. Door AR-markers langs de zijkanten van de gangpaden te plaatsen, konden we deze drift volledig elimineren. De toepassing van meer-camera visueel-inertiële odometrie laat veelbelovende resultaten zien.
In vervolgonderzoek willen we de betrouwbaarheid van deze aanpak verder evalueren en de meerwaarde van extra camera’s vergelijken met die van algemeen beschikbare sensoren, binnen een bredere variatie aan omgevingen.